INNOVA HAND, a Versatile and Simple Robotic Hand
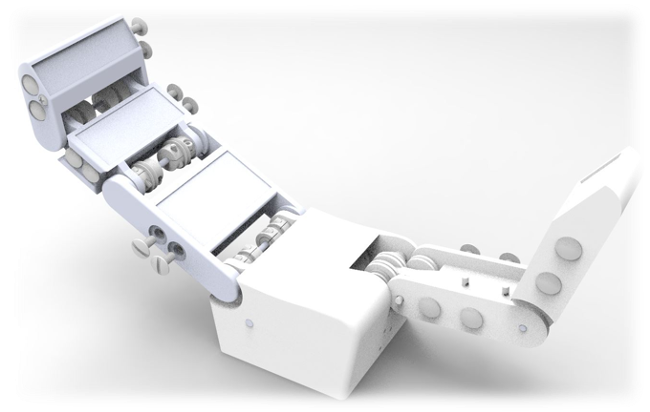
To balance cost and dexterity, current robotic hands for service robot are mainly focused on 2 or 3 finger underactuated hands. Inspired by winter mitten, even with four fingers tied together human hand are still functional to grasp a wide range of objects. INNOVA used one Thumb and one four-in-one Finger to accomplish fingertip, enveloping and fist grasping pose.
Jingwen Zhang
Robotics Researcher
My research interests include Legged Robot Locomotion and Optimization-based Motion Planning