About Me
My name is Jingwen Zhang (张精文), a PhD candidate in Robotics and Mechanism Laboratory (RoMeLa) at UCLA, with professor Dennis Hong. My research interests are in the area of studying legged robots and novel robot locomotion strategies via both intelligent design and optimization-based motion planning.
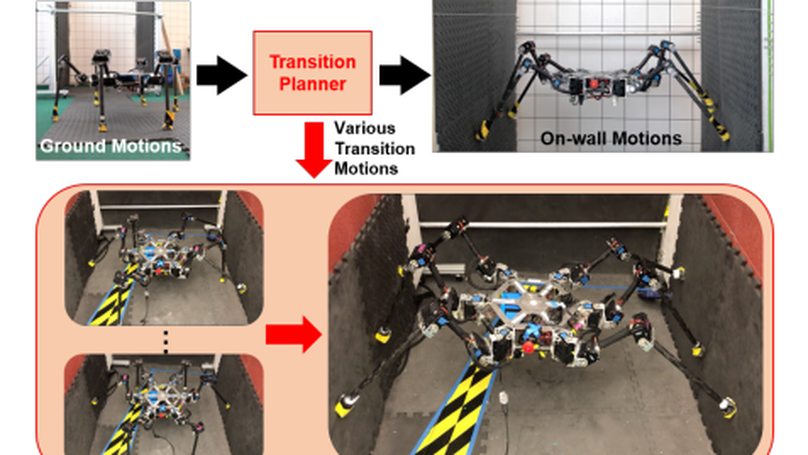
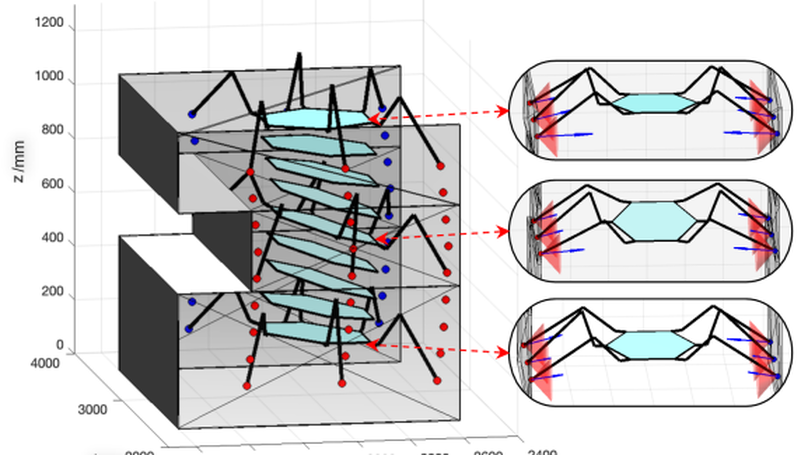
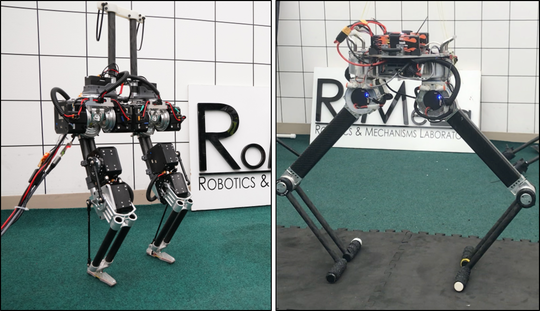
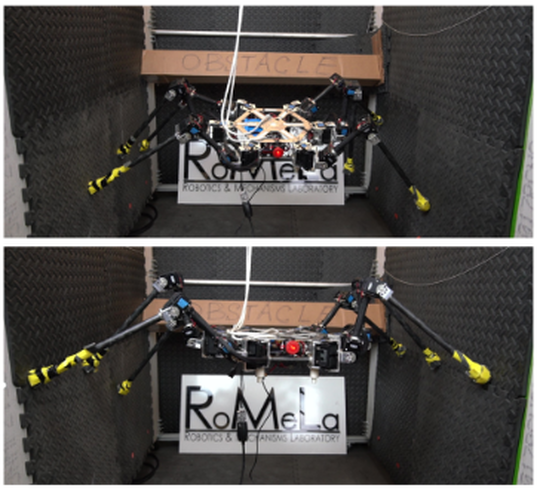
Currently, I am working on implementing and improving highly dynamic behaviors including running and jumping on bipedal robots (NABi2 & BRUCE) in our lab. Previously, I and my labmates developed a hexapod robot which is capable of climbing walls utilizing only friction forces. And modeling on the reaction force and torque of the climbing robot is an ongoing project as well in order to improve the planning performance.
Download my resumé.
- Legged Robot Locomotion
- Optimization-based Motion Planning
- Intelligent Robot Design and Modelling
-
Pursuing PhD in Robotics, 2017-present
University of California, Los Angeles (UCLA)
-
MS in Mechanical Engineering, 2015-2016
Columbia University
-
BS in Mechanical Engineering, 2011-2015
Tsinghua University
Publications
Projects
Teaching
Experience
Kovan Systems is a Chinese startup developing an automotive storage system. Responsibilities include:
- Optimized the algorithm of Laser Pointer in Human Work Station to improve the accuracy of pointing and the speed and position control of stepper-motors
- Compiled the Arduino Library of Laser Pointer
- Cooperated to design robots in the system like mover and picker